

Данный материал прислал нам автор - наш форумчанин Serge из г. Кишинёва, за что ему большое спасибо! 
С. Тинкован, г. Кишинев, Молдова
АННОТАЦИЯ
В конструкции большинства бытовых и фермерских инкубаторах вопрос поворота яиц проработан недостаточно или их электронная часть содержит избыточное количество деталей, которые оказывают влияние на стабильность и надежность работы системы поворота. Предлагаемый блок поворота позволит устранить эти недостатки, повысить стабильность работы и доработать имеющиеся инкубаторы начиная от бытовых и заканчивая промышленными, применяя всего лишь две микросхемы с минимальной обвязкой. В качестве дополнительной цели статьи является приведение примеров реализации обыденных аппаратных функций с помощью программ и более эффективное использование возможностей микроконтроллеров в роли устройства поворота для инкубатора.
ВВЕДЕНИЕ
Блок управления инкубатором предназначен для задания времени и обеспечения поворота лотков с яйцами в бытовых, фермерских и промышленных инкубаторах, у которых блок управления либо отсуствует или нуждается в доработке/модернизации. Другим немаловажным фактором является стабильность временных характеристик периода поворота, во многих публикациях временной параметр зависит от стабильности задающего RC генератора, частота которого делится многоразрядным счетчиком до интервала времени равного 1 час, это величина рекомендованная инструкцией по инкубации. В зависимости от изменения окружающей температуры погрешность временного интервала может достигнуть величины до 10 минут, если не принять мер по устранению температурной нестабильности. Помимо упомянутого, дополнительной задачей является сокращение числа корпусов микросхем, габаритов монтажа и повышение повторяемости конструкции. Учитывая специфику технологии инкубации необходимо обеспечить возможность перевода блока поворота на ручной режим при загрузке инкубатора или отключить в период наклева и вывода (последние 2-3 инкубации). Исходя из выше сказанного, изначально было принято решение выполнить блок поворота на микроконтроллере с учетом специфики решаемой задачи. В качестве микроконтроллера применен AT89C2051, который является урезанной версией классических контроллеров семейства MCS-51, который удачно подходит для реализации данного блока поворота и решает возложенные на него задачи.
Основные технические характеристики блока поворота:
• Период поворота 1 час +/- 0,2 сек.
• Контроль положения лотков по состоянию концевых датчиков
• Обслуживание выходного устройства электродвигатель или магнитный пускатель
• Контроль горизонтального положения лотков ручной
• Режим работы автоматический и ручной
• Напряжение питания +12В или +24В
1. Описание схемы блока поворота
Принимая во внимание структуру большинства устройств поворота (рис. 1.) в [1…5], они как правило состоят из задающего генератора, счетчика делителя, усилителя, реле и цепей контроля положения лотков (как правило это концевые датчики на разрыв или замыкание). Если эти функциональные узлы выполнить на обычных цифровых микросхемах, то вся конструкция будет содержать от 4 до 7 корпусов микросхем плюс вспомогательные детали для их нормальной работы, особенно это наглядно видно в [1…4] и меньшей мере в [5], там всего лишь 2 корпуса на считая стабилизатор напряжения. Если применить микроконтроллер, то большинство функциональных блоков можно выполнить программно и сама схема сокращается до одного корпуса, не считая микросхемы стабилизатора напряжения и вспомогательных деталей.
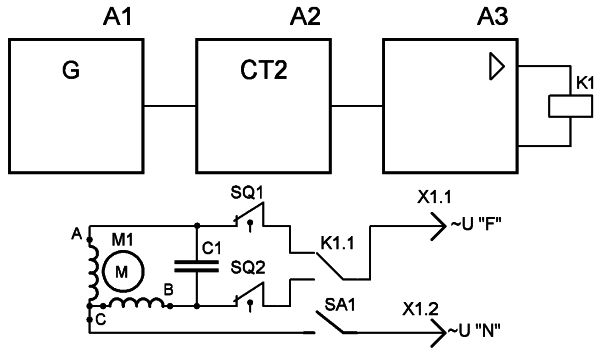
Рис. 1. Структурная схема блока поворота.
На первый взгляд кажется, что довольно роскошно применить микроконтроллер для такой задачи, но учитывая гибкость за счет замены программы и более стабильные временные характеристики благодаря свойствам кварцевого резонатора, которые намного лучше чем RC генераторов на транзисторах или микросхемах. В дополнение ко всему, если нет под рукой кварцевого резонатора с нужной частотой, то ситуацию легко можно исправить простой коррекцией коэффициента деления в программе управления. Сама схема содержит необходимый минимум деталей, но в качестве своеобразного избытка оставлена индикация работы блока, которая сигнализирует о работе всего блока поворота (рис. 2.). Включение цепей начального сброса и кварцевого резонатора для микроконтроллера стандартное, согласно рекомендациям производителя.
Исполнительные устройства (светодиод и реле) тоже особенностей не имеют и только по стабилизатору источника питания есть примечание, для более универсального исполнения он выполнен на микросхеме КР142ЕН12А, на вход которой можно подать напряжение до 45В (согласно справочным данным изготовителя), так как в дорабатываемом устройстве источник питания может выдать +12В (к примеру это бытовой инкубатор) или +24В, если дорабатывается блок поворота у промышленного инкубатора. Это необходимо для обеспечения универсальности его применения, если заведомо будет применяться напряжение +12В, то стабилизатор напряжения можно заменить на КР142ЕН5А в стандартном включении и резисторы R5…R7 можно удалить из схемы, при этом придется внести изменения в рисунок печатной платы.
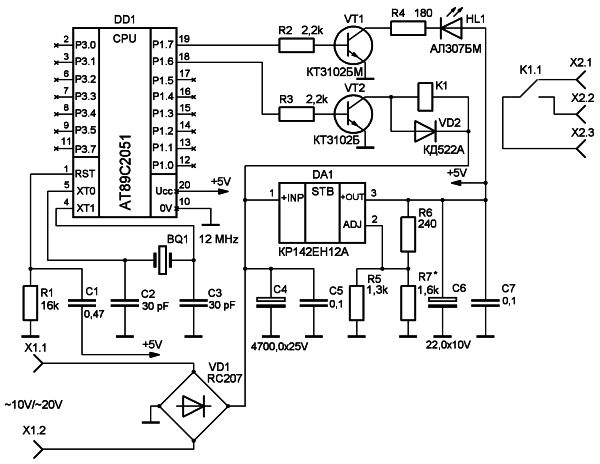
Рис. 2. Электрическая принципиальная схема блока поворота.
Если в качестве исполнительного устройства применен маломощный двигатель с редуктором типа РД-09 или СД-54, то его схема включения приведена на рис. 3, в случае применения трехфазного двигателя для поворота в промышленном инкубаторе подключение производится согласно рис. 4.
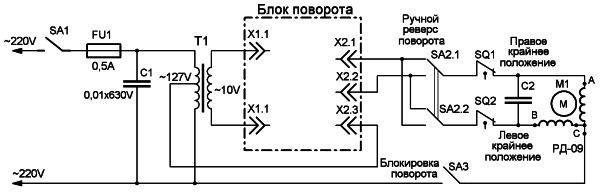
Рис. 3. Электрическая принципиальная схема подключения маломощного двигателя с редуктором.
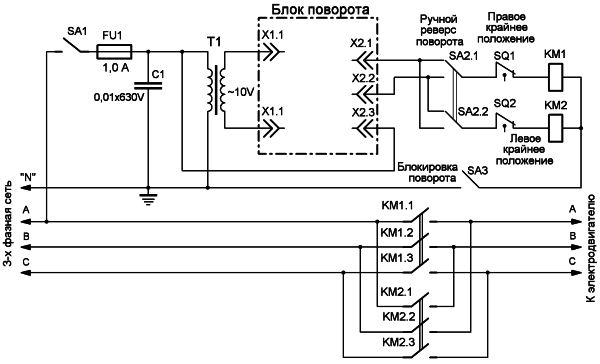
Рис. 4. Электрическая принципиальная схема подключения 3-х фазного двигателя.
Расположение концевых датчиков для бытовых инкубаторов типа ИПХ-10И [6] можно заимствовать из [5], аналогичное решение можно найти и у лабораторных инкубаторов ИЛБ-0,5 [7]. Для промышленных инкубаторов типа ИУП-45 расположение концевых датчиков приведена на рис. 5.
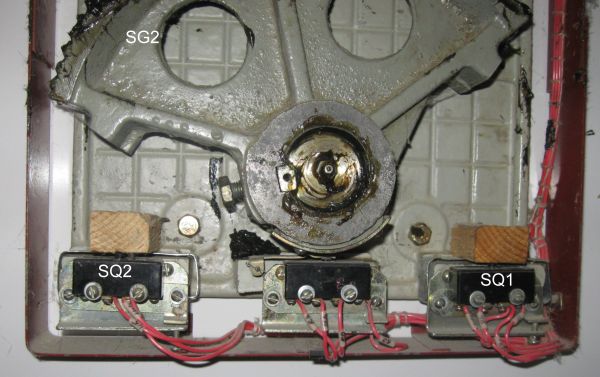
Рис. 5. Расположение концевых датчиков у промышленного инкубатора.
Если блок управления приспосабливается для инкубаторов серии ИНКИ, то можно использовать его родные концевые датчики, по алгоритму работы они совпадают с рассмотренными выше схемами.
Учитывая тот факт, что загрузка инкубатора всегда выполняется под контролем оператора, в схеме исключена автоматическая установка лотков в горизонтальное положение, что для данной ситуации допустима.
2. Программа управления
Для управления всей аппаратной части в память программ микроконтроллера записывается программа, которая и определяет режим работы всего блока поворота. В виду малого объема памяти программ микроконтроллера управляющая программа написана на языке Assembler-51, которая дает самый компактный исполняемый код после компиляции. По структуре программа условно поделена на две части:
- Основная программа;
- Подпрограмма обслуживания прерывания по таймеру.
В свою очередь основная программа состоит из процедуры инициализации и программы опроса флажков состояния (программный поллинг или опрос). В рамках инициализации предусмотрена запись начальных значений в служебные регистры SFR и портов ввода/вывода (В/В) микроконтроллера. В состав программы опроса включена процедура формирования временных интервалов путем накопления интервалов времени длительностью 50 мс в трех регистрах общего назначения R2, R3 и R4 и в зависимости от их содержимого выполняет управление состояния выводов В/В P1, где P1.7 управляет светодиодом HL1 и P1.6 – переброской контактов реле K1.
Подпрограмма обслуживания прерывания по таймеру T/C0 отсчитывает интервалы времени в 50 мс и по его истечению устанавливает в состояние лог. «1» пользовательский флажок с адресом 00h (этому флажку соответствует бит 0 ячейки внутренней памяти с адресом 20h). Сам таймер-счетчик T/C0 при инициализации запрограммирован в режим 1 и при каждом входе в прерывание загружает в регистры TL0 и TH0 значения констант для следующего интервала и запускает таймер-счетчик T/C0 по новой.
Далее основная программа циклически опрашивает состояние этого флажка и в случае его активации выполняет подпрограмму формирования интервала поворота, обнуляет содержимое флажка, где регистрам R2, R3 и R4 отведена следующая роль. В регистре R2 ведется счёт до значения 14h (число 20 в десятичном исчислении) и таким образом получаем интервал в 1 секунду, при достижении этой величины выполняется инверсия бита порта P1.7 (он управляет светодиодом HL1 через усилитель на транзисторе VT1) и содержимое R2 обнуляется, далее совершается переход на инкрементирование и контроль содержимого регистра R3, при значении R2
Мигание светодиода HL1 с периодом 2 секунды введено в программу с целью сигнализации нормальной работы блока поворота, если он погашен или горит постоянно, то это указывает на сбой в программе или неисправность блока. При возникновении сбоя программы достаточно на несколько секунд отключить питание и вновь включить обратно, после этого отсчет времени пойдет с нуля. В виду небольшого объема откомпилированной программы (исполняемый код занимает всего лишь 119 байт) можно привести её текст в HEX формате:
:03000000020030CB
:03000B0002006A86
:1000300075903F75870075891175881075984075A2
:10004000B81F75A8827A007B007C00003000FCC2DB
:10005000000ABA14F67A00B2970BBB3CEE7B000C98
:10006000BC3CE87C00B29602004BC28C758AB87525
:070070008C3CD28CD200325F
:00000001FF
Если возникает необходимость изменить значение периода поворота, то перед программированием контроллера в двоичном файле прошивки по адресу 61h можно изменить содержимое ячейки от 1 до 255 минут, что позволяет задать период поворота чуть больше 4-х часов. При применении кварцевого резонатора с частотой отличной от 12 МГц величину константы перезагрузки для таймера пересчитать по формуле
Kdiv=((1/(FBQ/12))•(65536+Ts/p)-Tdel)/( 1/(FBQ/12)) (1)
где: FBQ частота резонатора в Гц,
Ts/p длина подпрограммы прерывания, в данной версии её длина 8 циклов,
Tdel единица для подсчета задержек времени, в данной версии она составляет 0,05 сек.
после вычислений записать в двоичный файл прошивки по адресу 6Eh младший байт Kdiv и по адресу 71h – старший байт константы Kdiv. Например, для кварцевого резонатора с частотой 11,0592 МГц расчетная величина константы перезагрузки будет Kdiv=4C08h.
3. Монтаж и настройка электронной части
Большинство деталей блока поворота собраны на односторонней печатной плате с размерами 68х50 мм (рис. 6). При монтаже печатной платы в обязательном порядке предусмотреть установку микроконтроллера через панельку, это необходимо для удобства ремонта и смены его прошивки.
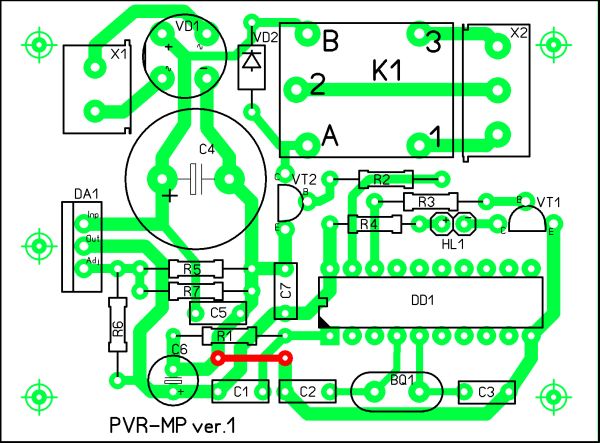
Рис. 6. Монтаж печатной платы блока поворота.
При соблюдении номиналов деталей и монтаже без ошибок плата должна заработать сразу, только предварительно проверить напряжение на выходе стабилизатора напряжения, ее величина составляет +5В +/-0,25В, при большем расхождении уточняют номинал резистора R7 и/или R5. Если есть в наличии более точные резисторы, то резисторы R5 и R7 можно заменить одним с величиной сопротивления 718 Ом. Для возможности начального сброса микроконтроллера не выключая и включая его питания можно подпаять параллельно конденсатору C1 (см. рис. 2.) кнопку с контактами на замыкание, ее расположить в удобном месте с учетом исключения случайного нажатия.
4. Детали и допустимая замена
В блоке поворота стабилизатор напряжения КР142ЕН12А можно заменить на LM317, выпрямительный мост RС207 можно заменить аналогичным по параметрам или 4-мя выпрямительными диодами, например типа N4007.
Светодиоды можно взять типа АЛ307 или аналогичные отечественного или зарубежного производства с рабочим прямым током 10-15 мА с красным цветом свечения.
Реле К1 может быть типа HJR-3FF-S-Z с рабочим напряжением обмотки 12В или 24В в зависимости от напряжения вторичной обмотки примененного понижающего трансформатора (~10В или ~20В). В качестве переключателя S1…S3 можно применить любые малогабаритные выключатели с соответствующими группами коммутации рассчитанные под сеть переменного тока ~220В. Для концевых датчиков положения SQ1, SQ2 можно применить любые выключатели с группой контактов на размыкание выдерживающий переменное напряжение ~280В и ток ~2А.
Силовой трансформатор можно выбрать любой, где вторичная обмотка обеспечивает нужное выходное напряжение и ток 150…200 мА и содержит в первичной обмотке отвод на 127В для двигателя с редуктором РД-09. Для большего удобства трансформатор предпочтительно выбрать из серии ТПП, например ТПП247-220/127-50, он удовлетворяет упомянутым требованиям.
Постоянные резисторы типа МЛТ, ОМЛТ, С2-33 или аналогичные с мощностью рассеивания 0,125 или 0,25 вт, электролитические конденсаторы К50-35, К50-45 или аналогичные импортного производства. Керамические конденсаторы можно взять любого типа отечественного или зарубежного производства.
И в заключение стоит отметить, что данную схему можно перевести на другой тип контроллера, например это может быть котроллер типа Tiny2313, который по цоколевке полностью совпадает с AT89C2051 не затрагивая саму печатную плату. Изменения в таком случае затронут только программу управления для Tiny2313. Помимо замены микроконтроллера в схему и программу можно ввести дополнительный сервис, например в виде звуковой сигнализации отсуствия поворота, автоматический перевод в горизонтальное положение, индикацию остаточного времени до переворота, возможность задания времени поворота и анализ аварийных ситуаций в силовой части, где все это предусмотрено в последующей версии для публикации блока поворота для промышленного инкубатора.
ЛИТЕРАТУРА
1. Григорьев А. Блок управления кинематикой инкубатора, «Радио» 1999, №10, стр. 32-33.
2. Тишкунов А. Терморегулятор для инкубатора — 2, «Схемотехника» 2001, №8 стр. 2-5
3. Заец Н. Устройство управления двигателем инкубатора. «Радио» 2002, №5, стр. 28-29.
4. Маньковский А. Автомат переворачивания лотков с яйцами в инкубаторе. «Радио» 2006, №1, стр. 41-42.
5. Тинкован С. Мини-инкубатор А50Б, «Радiоаматор» 2010, №11, стр. 29-33.
6. Инкубатор ИПХ-10И. Руководство по эксплуатации.
7. Инкубатор ИЛБ-0,5. Руководство по эксплуатации.
Доброго дня всем.
При необходимости для желающих изготовить плату самостоятельно прикрепляю файлы платы и необходимые прошивки для него.
Файлы:
pvr_ver1.zip
В дополнение к предыдущему посту привожу исправленную прошивку, где помимо устранения ошибки (в программе были перепутаны местами выводы P1.7 и P1.6) ужал исполняемый код с 119 байт до 82 байт не затрагивая самого алгоритма программы.
Файлы:
pvr_0a.zip
Контроллер XM-18
Приобрел для инкубатора (пелки)
http://minifermer.ru/product_163.html
http://inkubator.ucoz.com/news/termoreguljator_vysokoj_tochnosti_htc_1/2...
Также приобрел мотор GW370 на 12в, 2 оборота в минуту.
Вот в чем вопрос:
Нужны ли концевые выключатели для этого мотора?
http://alipromo.com/redirect/cpa/o/4bee196b8949f67bd8875a9c94641383/?to=...
А как мотор догадается в каком положении ему останавливаться?
Там-же написано
Т.е. можно задать время работы мотора, обычно его задают чуть больше времени доезда до концевика, чтобы снять напряжение. Это на случай поломки концевика и заклинивания механизма, чтобы мотор не сгорел. Если сделать переворот по времени, то за несколько дней набежит погрешность, и намотает лотки на ось и вывалит яйца.
А нельзя-ли сразу дать людям нормальную прошивку с нормальным контроллером без кварца? Зачем лишние детали.
Полная глупость. Точность переворота достаточна плюс-минус километр и без кварца.
Вместо этого нужно ввести сторожевой таймер, чтобы таких проблем не возникало.
Так часто поворачивать нельзя, хотя-бы 1 раз в два часа. (из литературы).
Доброго дня всем.
Ув. spotok, этот блок имеет почти 10 лет и сделан для чисто учебных целей для начинающих. Как любая разработка она не гарантирована от ошибок, так как был вынужден выдать на гора весь блок за 3 часа (от идеи до собранного и настроенного блока под конкретную конструкцию инкубатора), когда у клиента была авральная ситуация после замыканий фаз в 3-х фазной сети. Если есть предложения как это все решить на уровне схемотехники и программ, то я только приветствую, для удобства их можно выкладывать сюда. К примеру если решать задачу малой кровью, то можно по наглой можно применить ATiny2313 со встроенным тактовым генератором и по цоколевке полностью совпадает с AT89C2051 и плата остается прежней, без переделок.
Ниже привожу последнею версию с трансформатором на борту где устранил явные ошибки в печатке и добавил 2 варианта прошивок переворота, одна на 1 час, вторая на 2 часа. Для иной величины времени переворота в прошивке по адресу 63h записать требуемое значение времени в в минутах в шестнадцатеричном формате (предельное значение FFh или 255 в десятичном формате)
Делать блок поворота на AT89C2051 конечно круто, но можно и проще. Микросхема 176ИЕ5, транзистор, реле на 24 вольт. Нестабильность особой роли не играет, курица тоже не ровно через час ворочает. Можно купить ПИК-2, стабильность очень хорошая, а можно и розетку-таймер электро-механическую, только заменить родной концевик на такой же по размерам, но с тремя выводами. Период можно устанавливать и 1 и 1,5 и 2 и 3 часа. Дешево и сердито.
Спасибо за предложение, но принять не могу. С К176ИЕ5 я столкнулся еще в 2006-м, когда сделал пуско-наладку первого ИСУ-12, через год последовал второй ИСУ-12, у них в составе системы поворота стояла плата содержащая пресловутую К176ИЕ5 по схожей концепции. С ними я намучился изрядно, за сезон микросхемы летели не менее 2-3 раз, реле РПГ-8 тоже внесли свою лепту на пару с транзистором КТ503, в итоге в течении первого года эксплуатации у меня были сплошные маты в адрес изготовителей электронных компонентов. После 1,5-х лет мучений я сделал на макетнице в 2 экземпляра по выше приведенной схеме и встроил их в систему поворота ИСУ-12, после этого я забыл о нервотрепке с ними до 2010-го. Далее я заводские платы поворота я тщательно перебрал, заменил электролиты, КТ503 заменил на КТ972, реле РПГ-8 тоже заменил на импортные 3HJR 1FF - 24V и вернул платы обратно в состав системы поворота. Они проработали один сезон без вопросов, на второй сезон все по старому, вновь начали вылетать микрухи. Я на все это плюнул и встроил обратно уже новые версии плат поворота с трансформатором на борту, пока полет нормальный, никаких нареканий. Неплохо работала плата поворота от А50Б, так что лучше ее схему взять на вооружение, как никак 561 серия куда надежней чем К176. Ответ довольно прост, серия К176 не имеет защиты от статического разряда, в 561-й защита от статики уже заложена в ее схемотехнику. Только есть одно неудобство у 561-й серии, в ней нет прямого аналога ИЕ5, ближайший похожий счетчик это К561ИЕ16 с 14 разрядами счета против 15-ти и требует отдельного генератора импульсов (у К176ИЕ5 генератор встроенный, только вешай дополнительно RC цепь). А то что применен целый контроллер для меня не проблема, все равно в расход идет один корпус на плату, да и по прочей комплектации немного, с другой стороны надо израсходовать старые запасы комплектации, они у меня лежат без дела...А более высокая стабильность это просто побочный эффект, он приемлем для данного расклада, разница стоимости комплектации в несколько рублей не столь большая плата в обмен на более высокую надежность и удобство эксплуатации... Набор выдержек, например 1, 2 и 4 часа (или другой набор выдержек времени) можно задать программно путем перестановки джампера замыкающего на землю один из свободных выводов порта P1, только при этом мне придется слегка подправить программу, где будет включена процедура опроса состояния вывовдов под джамперы.
Добрый день! Прочитал много Ваших советов, комментариев. Чувствуется специалист высокого уровня. Я вставил комментарий не столько для Вас, сколько для тех, кто не знает что такое микроконтроллер, а уж тем более как его программировать, прошивать. Не знаю, почему у Вас такое отношение к 176ИЕ5, на Пятигорских бытовых инкубаторах поворот собран на этой микросхеме и работает годами. Сам собирал не один раз и ставил вместо штатного с моторчиком, кулачками и концевиком, работает нормально. Там тоже можно поставить джампер и, увеличивая емкость конденсатора или резистора, увеличивать время. Скажите, а какие в Молдове терморегуляторы в ходу, европейские или в основном китайские?
Да ничего страшного, по концепции схемотехники К176ИЕ5 очень близок к идеальному решению для раздела жесткая логика. Просто в нашем случае инкубатор в рядовом фермерском хозяйстве выступает в роли полигона экстремальных испытаний, там все что хочешь: пыль, вода, статический и электрический разряд, помехи по сети, всплески напряжения по цепям питания (зачастую сетевые фильтры и стабилизаторы с ними не справляются), при таком раскладе комплектация бытового назначения не выдерживает такого обращения. Это равноценно тому, как гонять личный автомобиль: по шоссе с хорошим покрытием или по полному бездорожью. Вот поэтому я такие вещи и учитываю для подобных условиях, все что я высказал выше, оно является накопленной статистикой за последние 9 лет, несмотря что я многое предпринимал при обслуживании и ремонту этих 2-х инков ИСУ-12, но из-за плохой сети всегда были проблемы, в основном это человеческий фактор (соседи с электросваркой и/или пьяный электрик на подстанции). Сами пятигорские инки по механике сделаны очень дубово (т. е. с надежностью нет проблем), с электроникой вопрос пока спорный, если электроника старше 8...10 лет с момента изготовления, то гембель обеспечен, причем это относится ко всем производителем. к примеру там вся комплектация была 1992 года, а сам инкубатор куплен в 2005-м. Иными словами старение радиоэлементов перечеркивает многое, независимо от того находится она в работе или хранении (последнее даже опасней чем непрерывная работа). Комплектация промышленного и вояковского назначения по надежности на голову выше чем бытовая (в качестве примера все та же микросхема К554СА3, она встречается в гражданском и военном исполнении, по цене разнобой доходит до 4...8 раз).
А не столь теплое отношение к 176-й серии объясняется просто, она более нежная и капризная в применении и эксплуатации, особенно критична к качеству питающего напряжения и климатических условий работы (жару нельзя, холод нельзя, статический разряд нельзя, напряжение свыше 9 В нельзя, ... сплошные ограничения по ее применению), вдобавок она сугубо гражданского применения (в промышленных и военных приложениях она не используется).
В нашем 21-м веке пора уже перейти на более новое, устаревшая элементная база уже становится препятствием для многих новшеств, так что сюда можно без боязни приводить технические решения от других, все уладим и разложим по полочкам. И чуть не забыл, на рынке в Молдавии преобладают терморегуляторы украинского производства, китайское практически не попадается мне на глаза (и в руки тоже), видимо заказывают по почте крайне малое количество для личных потребностей. Более крупные хозяйства для переоснащения в основном берут Белгородский МК-2с или в составе западного промышленного инкубатора (т. е. готовый и полностью оснащенный аппарат)
здравствуйте где купить этот Блок поворота для инкубатора
Такой блок поворота рассчитан для самостоятельного изготовления по схеме публикации в начале темы. Если нужен готовый блок по приведенной схеме, то могу предоставить собранную плату, только много хлопот с отправкой по почте (заполнять бумаги да и сама пересылка заметно удорожает такое удовольствие), только до конца июня я забит полностью работой и не смогу предоставить оперативно такой блок.
Всем доброго утра. Нужна ваша помощь хочу собрать инкубатор небольшой для собственных нужд но не могу сообразить с поворотом лотка а точнее с электрической частью.Есть таймер недельный програмируемый , есть двигатель РД-09 и соответственно концевички но не могу понять как это всё собрать чтоб РД-09 работал с реверсом.
Подскажите пожалуйста?
Один вопрос по таймеру, он позволяет ли он задать режим работа по такому сценарию: 1 час вкл. и 1час выкл. на протяжении суток (или 2 часа вкл. и 2 часа выкл.)? Если да то решить вопрос можно, в качестве нагрузки таймера применяется реле с обмоткой на 220В, переключающая группа реле пристегивается к месту помеченного знаком "?" на рисунке (средний вывод влево по схеме) и нужно включить резистор ПЭВ-15 с номиналом 1,5к между точкой "С" двигателя и выключателем блокировки поворота. Само питание всей схемы поворота включить напрямую в сеть, схема поворота не должна быть нагрузкой таймера.
Да позволяет но не на 2 а на 3 часа там всего восемь программ и чтобы поделить сутки нужно по 3 часа а вообще там можно установить как угодно хоть поминутно хоть почасово.И спасибо за подсказку так всё просто а я до такого и не допёр, за рэлюшки думал но получалось сильно мудрёно а вот такой вариант в голову не пришел. Еще раз большое спасибо.
А зачем резистор ведь на вашей схеме нету а я в принципе не чего не меняю?
Использовать то можно но буду делать из того что есть а есть цифровой терморегулятор, таймер.
Спасибо за ссылку вечером посмотрю.
Исходя из того, что AT89C2051 уже как 10 лет устарела и на смену ей пришел МК ATiny2313(А) То могу привести пример модуля поворота на МК ATiny2313 - 20:
Программа для МК написанная на языке С++ с помощью Atmel Studio 6.2. Все тесты прошла в программе эмуляторе Proteus 8 Professional. Так как в программу внесены доработки, печатная плата имеет тоже изменения.
Какие были внесены доработки:
1) Путем кнопочного управления появилась возможность выставлять время поворота от 1 часа до 4 часов с шагом 1 час.
2) Добавлена кнопка отключения всех основных функций МК. Остановка счетчика.
3) Кнопка резет, так же имеет функцию включения МК, то есть запускает все основные функции МК.
4) Кнопка Реверса реле, или задаем стартовый поворот лодков, если нужно.
5) в МК можно добавить еще функционала так как на данный момент память занята - Program Memory Usage : 728 bytes 35,5 % Full.
6) МК использует внутренний РЦ - генератор на 8 МГЦ - 14 цк+65мс.
7) Погрешность не превышает +-1 минуты.
Если использовать АТМега8 можно добавить ЖК индикатор с датчиками температуры. влажности и.т.д.
Привожу архивы с прошивкой, схемой. печатными платами. а также их проекты. Для ознакомления.
С резистором ПЭВ-15 на 1,5к объясняется все просто, для гашения напряжения с 220В до 127В, ведь рабочее напряжение обмоток двигателя РД-09 составляет 127В.
О-о-о, в нашем полку прибыло пополнение. Продолжение идеи хорошее, только внесу некоторые уточнения связанные со спецификой систем поворота для промышленных инкубаторов.
1) Нужно ввести отслеживание срабатывания концевых датчиков положения лотков, это левое и правое крайнее положение как минимум, идеальный случай это присуствие и третьего концевика для горизонтального положения. По их состоянию можно отследить текущее положение лотков и отследить поломку механизма поворота, этим критерием является отсуствие замыкания горизонтального концевика по истечении удвоенного времени переворота при разрешении переворота.
2) Вести звуковое оповещение при возникновении различных обстоятельств, в т. ч. и аварийных
3) Индикатор желателен, не обязательно ЖКИ, как минимум 4 знакоместа
4) на все про все достаточно 3...4 кнопок для меню и задания режима, 3 вывода для считывания состояния концевых датчиков
5) для управления магнитными пускателями нужно 2 выхода для реле (через соответствующий усилитель тока), где возможны 2 варианта внешней коммутации: первый - это поворот влево одним реле и поворот вправо другим реле, второй - первое реле поворот влево/вправо и второе реле разрешение/запрет поворота
Остальной сервис приветствуется, лишь бы хватило памяти программ самого контроллера. Подобные наработки у меня есть давно, даже спаял 2 платы для таких вещей, только не было заявок для применения и перегрузка по работе которая съедает все свободное время.
Если применить Атмега8, то считаю это излишеством, уже имеет смысл собирать целый блок управления от Дмитрия (см. соответствующую тему по этой ветке)
Изначально эта тема была рассчитана для промышленного инкубатора, поэтому весь акцент и поставлен именно на него, если это приложение применить для мелких инкубаторов, то получиться дорого и роскошно, по располагаемой мною сведениями на текущий момент такой блок рентабелен для инкубаторов вместимостью 500 яиц и более.
Ну как дорого, если 25 Долларов это дорого ?))
ЖК Nokia 5110 стоит всего 4.5 уе, можно 16х2 сегментный HD44780 стоит одинаково.
Удобные ЖК для вывода разной информации с поддержкой русского языка.
Датчик температуры и влажности хорошо подходит от Arduino DHT22 точность температуры 0.5 градуса измеряет от 0 до 50 градусов, влажность от 0-100% , погрешность 2%. стоимость всего 6 уе.
Атмега8 стоит всего 1.5 уе. столько же стоит ATtiny2313.
транзисторы по 20 центов, 1-2 уе
свето-диоды, кнопки 1-2 уе
реле 12 вольт с контактами 220вольт модель: HJR-3FF-12VDC-S-Z стоит до 0.8 уе
текстолит, другие доп детали 5 уе.
Вся электронная часть обойдется примерно 25 уе. не думаю что 10 уе играют роль в цене.
И того блок управление с ЖК дисплеем обойдеться в 25уе = 1400 рублей = 525грн.
Да, сейчас можно сказать, кажется дороговато. год назад можно было в три раза дешевле все это купить.
У меня инкубатор на 100 куриных яиц. Поворот лодков производиться путем смещения рамы в раме, специальные прутики толкая переворачивают яйца на 180 градусов создавая эффект курицы.
Раньше переворот лодков был ручного типа, а управление температурой осуществлялось путем терморегулятора ТЛ-3-1. кстати Ищу на него схему!?. Сейчас после чего , как почти изучил язык программирования МК появилась возможность создать универсальный блок управление Инкубатором.
Чуть поже приведу варианты на разных ЖК с исправлениями который привел Сергей.
Еще есть вариант, использовать термометры стеклянные ртутные электроконтактные , дает возможность более точно управлять температурой инкубатора.
Особо возражать не стану, пусть будет еще один вариант в общую копилку. Когда идет в ход микроконтроллер там разница в деталях что голый поворот или термостат с поворотом невелика, многое уже зависит от того как написана программа. Лично я считаю что блок поворота с индикатором и кнопками допустимо применить для промышленного приложения, пользователь согласится доплатить за такое удобство, Для случая инкубатора помельче (менее 700 яиц) такое тоже применимо, только уже зависит от каприза владельца инкубатора: пойти на такие затраты или нет. К примеру мой вариант платы с трансформатором на борту тянул около 8,5 бакса, ими я обеспечил моих заказчиков которым я обслуживаю инкубаторы (а в основном на 15000 яиц) и пока дополнительных заявок не поступало. Если уж очень хочется совместить поворот с терморегулятором, то придется писать в похожую тему либо открывать отдельную, вдобавок периодика и интернет забит до упора простыми схемами на микроконтроллере с функцией термостата и поворота, у меня тоже есть чем дополнить подобный арсенал. В этой теме я готов рассматривать все варианты улучшения исходной схемы, если объем рассматриваемого материала выходит за рамки темы (т. е. будет перевес с сторону полнофунционального блока управления инкубатором), то есть резон открыть отдельную тему, валить сюда до кучи всякий хлам неуместно.
Ну вы знаете даже, если не полноценная схема перерастает в полноценную, ее тяжело считать всяким хламом)). Ну если вы просите не вылазить за рамки блока поворота, то так ему и быть.
Не большой вопрос по
Вывести: каким образом?
Думал, например, если произойдет залипание концевика и при повороте может вырвать весь механизм не дожидаясь удвоенного времени, следует вопрос как выловить этот момент?
Надеюсь вопрос по существу.
Хорошо, разверну мысль более подробно.
Изначально в качестве исходной задачи этой темы был только блок поворота, при обсуждении всегда рассчитываю на пополнение новыми идеями, задачами и предложениями которые возникают при различных условиях применения и моделей инкубаторов, в т. ч. и самодельных. По ходу обсуждения вполне естественно что будут предлагаться и более сложные варианты, например добавление терморегулятора, измерителя влажности и т. д., которые автоматом переводят обсуждаемый блок из категории блок поворота в категорию блок управления с функцией поворота, это автоматически ведет к отклонению от основной темы. При таком раскладе я согласен это отметить как возможное направление развития идеи с приведением ссылок на подобные решения, но основное направление темы надо сохранить. Если этого не сделать, то тема плавно перейдет в обсуждение блока управления похожего на блок Дмитрия и фактически будет темой-дублем, поэтому я эти моменты довольно жестко отслеживаю. Другой довод это то, чтобы содержимое соответствовало названию темы, если тему прочтет сторонний посетитель, то представляю его ощущение, когда название темы одно и объект разговора (дискуссии) совершено другой...
С концевиками разговор особый, многое зависит от их качества и надежности с одной стороны, введение многоуровневого контроля работоспособности и защиты с другой стороны. В промышленных инкубаторах кроме контроля положения концевиком идет контроль температуры и потребляемый ток двигателя системы поворота. Для этого в механике есть скоба-упор для крайних положений, она сделана так, что выдерживает большие усилия, далее алгоритм следующий: если по концевику движок не остановился, то привод упрется в в скобу упор, мотор при этом будет испытывать внешнее торможение через редуктор и резко подскочит величина рабочего тока в его обмотках, термоавтомат отследит скачок тока и/или температуры корпуса движка и отключит его. После такого срабатывания уже придется разбираться с неполадками механизма поворота. Все упомянутое можно выполнить и электронным способом, это будет прекрасным дополнением для любого блока поворота и/или блока управления инкубаторм. В завершение порекомендую концевики выбирать проверенные и иметь определенный запас на случай замены, кроме этого почаще проверять концевики в процессе работы икубатора.
Подумал, если мы используем МК то самый верный способ использовать его функционал.
Имея два 12 вольтных концевика для управления поворота в лево-право и два 12 вольтных реле.
В определенное время срабатывает к примеру левое реле, включается двигатель до ходит до концевика, нажимая на него отправляя сигнал на МК и выключает реле. после определенного времени включается правое реле проходит туже операцию с правым концевиком. Существует проверка включения реле и опрос положений контактов в концевиков. аварийный сигнал выходит на динамик в случае неисправности. Залипания контактов. выхода из строя двигателя.
Кстати на четырех сегментный индикатор, нужно 11 портов МК, когда на ЖК дисплей уходит всего 7 портов.
Я к примеру стараюсь основную функцию возложить на сам концевик, а передача его состояния контроллеру уже дополнение к нему. Для этого в промышленных инкубаторах применят специфичные концевики, они с 2-я группами контактов, одна группа на размыкание, вторая на замыкание. Последняя предназначена для контроллера, первая для непосредственной остановки, в случае отказа контроллера можно спокойно перевести на ручной режим переворота (просто переводится в нужное положение переключатель направления поворота, см. схему из статьи в начале темы). По вопросу индикаторов, применять ЖКИ или СДИ уже дело вкуса и желания поковыряться в железе, каждый имеет свои "+" и "-", но статистика показывает, СДИ выбирают намного чаще чем ЖКИ, это зависит чисто от субъективного фактора (уровень освещения, острота зрения, собственные взгляды и т.д.). К примеру я многие мелкие вещи уже рассматриваю через очки, для меня такой расклад уже напрягает при проверке показаний индикаторов. У кого зрение не подсажено, тот может спокойно иметь дело с более мелким размером индикатора, поэтому ему без разницы какой тип индикатора пустить в ход.
С контролем состояния концевиков контроллером у меня накопилось много инфы, на ее основе можно написать не менее 2-3 статей, поэтому многое еще впереди.
СДИ выбираю чаще, потому что нет опыта работы с ЖК, ЖК -имеет возможность управлять подсветкой, имеет возможность управлять размером шрифта, имеет возможность задавать тон шрифта. даже если зрение у вас +5, вы подстроите для себя шрифт таким образом что его станет видно. ЖК экономит выводы МК. Я не вижу не одного минуса не в цене не в функционале. Что не скажешь о СДИ, который и дорогой и мало функционален. единственный плюс - это много схем как его подключить.
Не думаю что стоит на этом так заострять проблему, мне проще сделать одну и ту же схему в двух вариантах, одна на СДИ и вторая на ЖКИ. Помимо этого есть еще одна любопытная вещь, схемы с СДИ очень просто позволяют выполнить совместную поддержку клавиатуры с динамическим опросом, сделать такое с ЖКИ посложнее, чаще всего встречал решения, где для клавиатуры были задействованы отдельные выводы портов В/В, есть и совмещенные варианты (без выделенных выводов В/В), но там очень приличный рак мозгов при написании программы.
Если есть более приемлемые решения такой задачи, то я только "за", при этом поставлю одно ограничение: на ЖКИ и 4 кнопки отводится один порт В/В (8 выводов), 2 вывода для реле, 1 вывод для динамика (акустический сигнал), 2 вывода для анализа состояния 3-х концевиков и 2 вывода для последовательного порта (для случая если этот блок поворота входит в состав более главного блока управления инкубатором).
Фактически то что перечислил можно воспринимать как ТЗ для разработки улучшенной версии блока поворота, если оно будет выполнено то можно решить очень широкий круг задач связанных с поворотом яиц. С моей стороны могу предоставить даже электрическую схему, с программой чуть скромнее, только ее структуру и основные требования. Если то же самое попытаться сделать на СДИ, то будет очень хорошая морока, без лишних микросхем не обойтись, как минимум 1 корпус будет нужен.
да вот как раз и нет! ЖКИ не изменяет информации если вы не стробируете данные. у меня в контроллере шина данных ЖКИ общая с клавиатурой. гораздо хуже дело обстоит как раз с LED индикаторами в динамике. проработка схемы без тестов программы может привести к тому что у вас не хватит времени для обработки данных с датчиков. если с быстрыми типа DS18B20 еще все проходит - то с медленными типа DHT11 возникнет проблема.
У меня СД индикатор и клавиатура с динамической индикацией и опросом вопрос уже отлажен у меня более 2-х десятилетий назад, просто для введенных датчиков многое приходится привязывать к событиям прерываний, но тем не менее вопрос решаем, для нашего конкретного случая (т. е. блок поворота) нет потребности обслуживать датчики температуры, влажности и т. д., т.к. они отсуствуют в составе системы. Для процедур где в основном отслеживается события по таймеру и состояния нажатия кнопок для СД индикаторов нет никаких проблем, все можно отследить и держать под контролем, то же самое относится к ЖКИ + кнопки. Если повесить датчики и их обслуживать, то данная тема меняет направление, про это я отметил в постах выше (блок поворота превращается в блок управления инкубатором с функцией поворота). Ну если так очень хочется, то я согласен рассматривать исполнение поворота (программно и аппаратно) в составе блоков управления инкубатором различных моделей и публикаций (в периодке и инете).
В посте #29 я набросал подобие ТЗ для блока поворота с ЖКИ, ради интереса я могу предоставить приципиальную схему и требования к программе в моем видении, если есть желание у добровольцев, то они могут поучаствовать в разработке программы под него, например я настроен для еще не представленной схемы писать прогу на ассемблере, в крайнем случае на "С" с ассемблерными вставками.
Искомую схему добил, представляю на рассмотрение. Изначально поставил "древний" процессор, при желании его можно заменить без лишних хлопот на Tiny2313, цоколевка совпадает. Теперь осталось самое "малое", написать саму программу....