

Представьте себе, что у вас появилась возможность сэкономить примерно 3 миллиона рублей в год за счет оптимизации сбора урожая. Что для этого нужно? Ответ – интегрировать в сельхозкомбайны современные технологии.
Компания Cognitive Pilot разработала робот-автопилот, который может взять на себя руление комбайном и позволит водителю следить не за траекторией движения, а за качеством уборки поля.
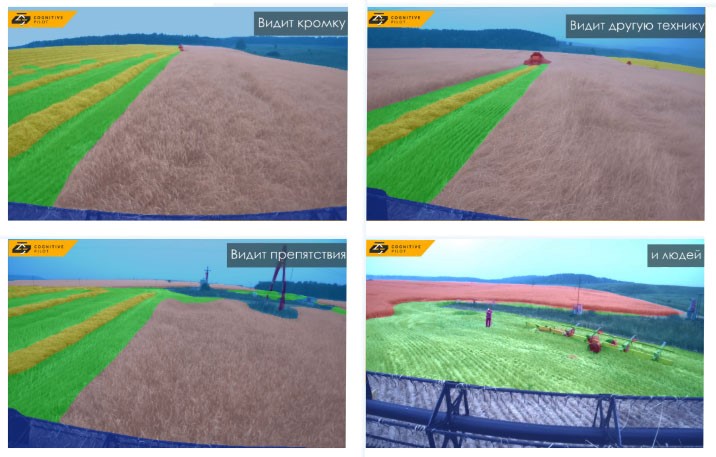
Робот может собирать урожай по кромке, по валку или по рядку. Все, что требуется – поставить комбайн, оснащенный автопилотом, вдоль края собранной культуры и запустить. Он будет не просто ехать по виртуальной линии, а следить за тем, где урожай еще не собран, и перестраиваться в это место. Более того, он сообщит другим оснащенным машинам о своей траектории, и они будут учитывать ее во время движения. Препятствия на пути? Не проблема – робот видит их заранее и либо предупреждает водителя, либо останавливает комбайн самостоятельно. Никаких сложных настроек и непонятных интерфейсов – программа сама анализирует все данные и предлагает водителю простые решения.
Особенности системы:
- Она двигается точно по кромке скошенной культуры.
- Система держит необходимую для сбора конкретной культуры скорость движения с точностью до 1 км/час.
- Она умеет распознавать не только статичные препятствия, но и транспорт, людей и другие движущиеся объекты. Перед ними она тоже останавливает комбайн.
Установка автопилота на парк машин позволит сократить прямые потери урожая на 5-10% и снизить расход топлива во время уборки на 3-5%. Также робот уменьшит количество аварий в поле, а значит, агрономам и владельцам не придется тратиться на починку дорогостоящих комбайнов.

Из чего состоит система:
- Блок управления с нейропроцессором – "мозг" автопилота.
- Цветная видеокамера – "глаза" автопилота.
- Планшет, через который водитель управляет роботом. Ставится в кабине.
- Цифровой гидроблок для управления рулением.
- Датчики углов поворота колес.
- Комплект кабелей и жгутов для подключения электроники и датчиков.
- Комплект РВД для подключения к гидравлической системе.
Как происходит процесс установки автопилота?
- В гидравлическую систему устанавливается цифровой насос-дозатор.
- На рулевые колеса устанавливается датчик угла поворота колес.
- Производится калибровка датчика и насоса-дозатора.
- На кабину устанавливается камера.
- Под кабиной монтируется вычислительный блок.
- Производится включение системы и калибровка камеры.
Установка комплекта происходит в течение дня и входит в стоимость.
Чем отличается данная система от систем параллельного вождения?
Для корректной работы системы параллельного вождения необходима подписка на получение сигналов RTK-станции и обновление данных навигации, которая стоит около пяти тысяч рублей в месяц. При работе без поправок на длинных прогонах техника идет "волной". Перед запуском систему нужно "прогревать" в течение 10-15 минут, чтобы она поймала сигнал. Однако по мере удаления от станции RTK он ослабевает, особенно в полях с лесополосами, перепадами высот и другими естественными препятствиями, и точность движения комбайна начинает меняться в диапазоне от 30 до 150 см. Это приводит к тому, что на поле появляются неровные выкосы и островки нескошеной культуры, где-то комбайн виляет, и механизатор вынужден перехватывать управление, а кроме этого, в самом планировщике появляются ложные траектории, которые влияют на следующие проходы. В итоге, придется либо оставить нескошенные участки, то есть потерять этот урожай, либо потратить дополнительное топливо и время работы оператора комбайна.
Комбайнеры часто работают по вахтовому методу, то есть владельцы поля с ними не знакомы и не знают, насколько добросовестно они выполняют свою работу. Важно помнить, что операторы получают гонорар за убранные гектары, и они не думают о том, например, как избежать перерасхода топлива. Плюс они устают: сохранять максимальную концентрацию изо дня в день по 12 часов в сутки – непростая задача. Автопилот решает проблему человеческого фактора: он всегда работает с максимальной эффективностью.
Автопилот Cognitive Agro Pilot запускается сразу и анализирует обстановку так же, как это делает механизатор, то есть по ходу движения. Он распознает, где кромка, валок или рядок, что вокруг комбайна, какая культура перед ним. Если отдать ему процесс руления, то механизатор сможет следить за тем, качественно ли ведется сбор урожая. И это даст возможность увеличить КПД обработки поля.